Titans Technology
Titans Technology

Misión
Titans Technology ofrece al público la comercialización de productos de robótica a
través de una página web; Igualmente brinda tutoriales sobre electrónica que le
permitirá al usuario obtener los elementos y conocimientos necesarios para la creación
de proyectos que incentiven su desarrollo tecnológico.
Visión
En el año 2025 Titans Technology tendrá la plataforma con mejor soporte para la
creación de proyectos tecnológicos y electrónicos logrando los más altos índices de
desarrollo creativo, innovador, interactivo, lógico y analítico en nuestros usuarios.
En nuestro entorno rodeado por los avances tecnológicos, en el que se están introduciendo
diferentes campos de investigación, para lograr la integración en el desarrollo de la
sociedad, se busca acercar a los niños, adolescentes y adultos al mundo de la programación,
electrónica y ensamble de hardware por medio de electrónica básica.
Gerente
Ejerce funciones y actividades en la gestión de la empresa. Esta formado y capacitado para la toma de decisiones. Resuelve problemas al interior de la organización tomando en cuenta el proceso. Asume la responsabilidad de la toma de decisiones y realiza la evaluación de los resultados de las aplicaciones de estas decisiones.
Finanzas
Controla el presupuesto asignado, manteniendo niveles de gastos pertinentes de acuerdo al presupuesto aprobado y a los plazos que para el efecto señala la ley, gestiona la información financiera junto con tramites relacionados con la misma.
Producción
Trabaja en la parte manufacturera y es el responsables de gestionar los materiales y los trabajadores. Se aseguran de que la producción es tan eficiente como sea posible.
Marketing
Desarrolla estrategias que deben fundamentar la orientación que deseamos darle a un producto o servicio con los objetivos de rentabilidad y de asignación eficiente de los recursos.
*Folleto


RR.HH
Dirige, coordina y controla el proceso de reclutamiento, selección, contratación e inducción del personal, de acuerdo a las políticas, normas y procedimientos establecidos por la organización, además de realizar estudios de sueldos y salarios tendientes a orientar las políticas salariales de la organización
Principios corporativos
- Brindar garantía y seguridad en nuestros productos y/o servicio.
- Respetar los derechos humanos en nuestras actividades empresariales.
- Procurar siempre la plena satisfacción de los gustos y necesidades de los clientes.
- Consolidar un equipo de trabajo que se desempeñe dentro de un clima laboral positivo.
conocer y desarrollar sus habilidades por medio de proyectos que permiten tener una visión
amplia de la relación que tiene el hardware y software, complementado con la inculcación
de valores como lo son la innovación, pasión, empatía y calidad en cada proyecto de tal
manera incentivar el desarrollo tecnológico en la comunidad.
Esto nos permite adquirir conocimientos para mantener y consolidar nuestro proyecto,
además de cumplir con el requisito que el SENA exige a los aprendices.
Titans Technology se desarrolla en un espacio virtual, a través de una página web, la cual,
exhibe al público proyectos tecnológicos hechos y programados por nosotros mismos y
preparados para su correcta distribución.
Titans Technology fue creada con el fin de atraer a todo tipo de público (niños, jóvenes y
adultos) a que se interesen por el conocimiento acerca de la tecnología y la electrónica ya
que con la unión de estas dos áreas se pueden crear nunca antes vistas, y con ello darle un
puesto a nuestra comunidad en el mundo que cada vez va avanzando a pasos agigantados.
Además de todo esto facilitar la etapa estudiantil a los jóvenes que no disponen del tiempo
suficiente para desarrollar dichos proyectos.
Titans Technology ofrece un amplio catálogo de productos con el fin de abarcar todas
las necesidades de los usuarios, desde los Kits hasta los proyectos terminados, nuestros
productos son capaces de permitir el desarrollo de un pensamiento lógico, creativo,
analítico e innovador en todos nuestros usuarios usando como vía la programación y la
electrónica básica. Nuestros usuarios podrán comprobar la excelente calidad y atención
al cliente es la mejor que se puede llegar a proporcionar todo esto con el fin de siempre
procurar el bienestar de la comunidad. Nuestra única limitante podría ser la capacidad
de pago que nuestros clientes tendrán que asumir.
Además, este negocio se realiza como requisito para adquirir los títulos de bachilleres
con énfasis en gestión empresarial y técnicos del Sena en programación de software.
El técnico con el Sena que decidimos tomar nos brinda la capacitación para programar
en diferentes lenguajes de programación, lo cual es esencial para realizar proyectos y
guías de desarrollo electrónico, relacionándose directamente con lo que aprendemos.
Desarrollar la guía del proyecto productivo, ejecutando todo el proceso de creación de
empresas a partir de la idea de negocio de desarrollo de una página web para distribuir
elementos electrónicos y proyectos robóticos con Arduino para crear cursos de
electrónica y programación básica, como forma práctica de consolidar los
conocimientos obtenidos en el área empresarial y demás áreas del conocimiento.
DOFA
● Debilidades
- Tenemos competencia directa
- Hay delincuencia en el municipio que podría
perjudicar los intereses del negocio.
- No hay donde actualizar nuestros conocimientos
para el desarrollo de proyectos electrónicos cerca
al municipio.
- Falta de demanda en el mercado.
● Oportunidades
- Con los sitios ecológicos y turísticos que hay en
Tabio podríamos promocionar los productos voz
a voz.
- La localización de la empresa está en un sitio
comercial.
- Pocos sitios ofrecen este tipo de productos y
cursos sobre electrónica.
- Apoyo del SENA para ampliar conocimientos de
programación.
- Expansión del mercado en la Web.
- Apoyo del docente y padres.
- Cierre de empresas por parte de la competencia.
● Fortalezas
- Suficiente conocimiento en programación para el
buen funcionamiento de proyectos.
- Poseer el título como técnicos en programación de
software con el SENA, el cual es un respaldo de
credibilidad.
- Intereses notables de parte de comunidades
educativas para aprender a desarrollar proyectos.
● Amenazas
- Alta competencia de grandes empresas en la web.
- Crecimiento lento del mercado electrónico en Tabio.
- Tecnología cambiante.
- Variación precio del dólar.
Titans Technology S.A.S ofrece ocho productos, los cuales están realizados en madera MDF, algunos incluyen CD tutorial y manual de ensamble.
Proyectos
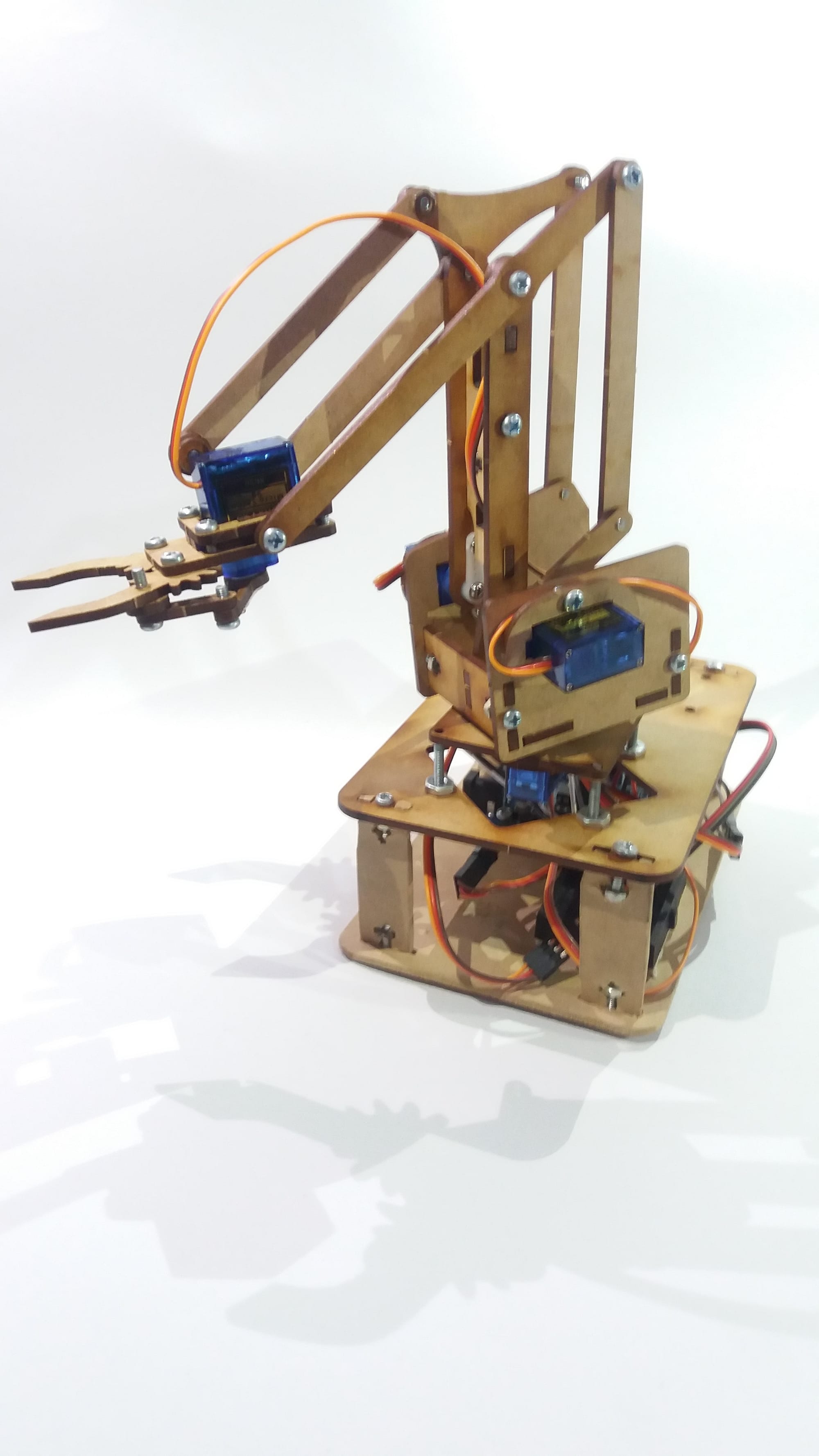
· Proyectos tecnológicos desarrollados con Arduino y otros elementos electrónicos ya descritos en los kits, se venderá ya construido el prototipo, con la programación incluida en el Arduinos. Los proyectos son: Brazo robótico, carro a control remoto, robot esquiva obstáculo y lampara cubo led.
BRAZO ROBÓTICO
El código que utiliza el brazo robótico es el siguiente:
//Titans Technology S.A.S programa para controlar Brazo robótico desde el computador.
#include
Servo Base; // Creación de un objeto servo, ubicación: base, movimiento: izquierda - derecha
Servo Izquierdo; // Creación de un objeto servo, ubicación: izquierda, movimiento: adelante - atrás
Servo Derecho; // Creación de un objeto servo, ubicación: derecha, movimiento: adelante - atrás
Servo Garra; // Creación de un objeto servo, ubicación: extremo del brazo, movimiento: abrir - cerrar
//Definición de variables que contienen la posición del servo (1-180°)
int PosicionBase;
int PosicionIzquierdo;
int PosicionDerecho;
int PosicionGarra;
//La función de configuración se ejecuta al restablecer o encender la placa.
void setup() {
Base.attach(11); // Asignación del pin 11 al objeto servo de la base
Izquierdo.attach(10); // Asignación del pin 10 al objeto servo izquierdo
Derecho.attach(9); // Asignación del pin 9 al objeto servo derecho
Garra.attach(6); // Asignación del pin 6 al objeto servo de la garra
// Declara el puerto serie
Serial.begin(9600);
}
//La función de repetición se ejecuta después del void setup()
void loop() {
//Obtener el número de bytes disponibles para leer desde el puerto serie que se encuentra disponible en Serial.parseInt()
while (Serial.available() > 0) {
PosicionBase = Serial.parseInt();
PosicionIzquierdo = Serial.parseInt();
PosicionDerecho = Serial.parseInt();
PosicionGarra = Serial.parseInt();
if (Serial.read() == 'x') { // Continua y actualiza las posiciones del servo
// Actualiza las posiciones del servo correspondiente
Base.write(PosicionBase);
Izquierdo.write(PosicionIzquierdo);
Derecho.write(PosicionDerecho);
Garra.write(PosicionGarra);
}
}
}
Basado en el popular MeArm. Es compatible con Arduino o cualquier tarjeta de desarrollo o microcontrolador con salidas digitales o de PWM. Es un proyecto tecnológico escolar para hacer que hasta los más pequeños aprendan a construir su propio brazo robótico.
!Está listo para comenzar a crear su propia programación¡
Sin embargo ya está pre programado para ser utilizado con el software de Mecon
CARRO CONTROL REMOTO Y EVASOR
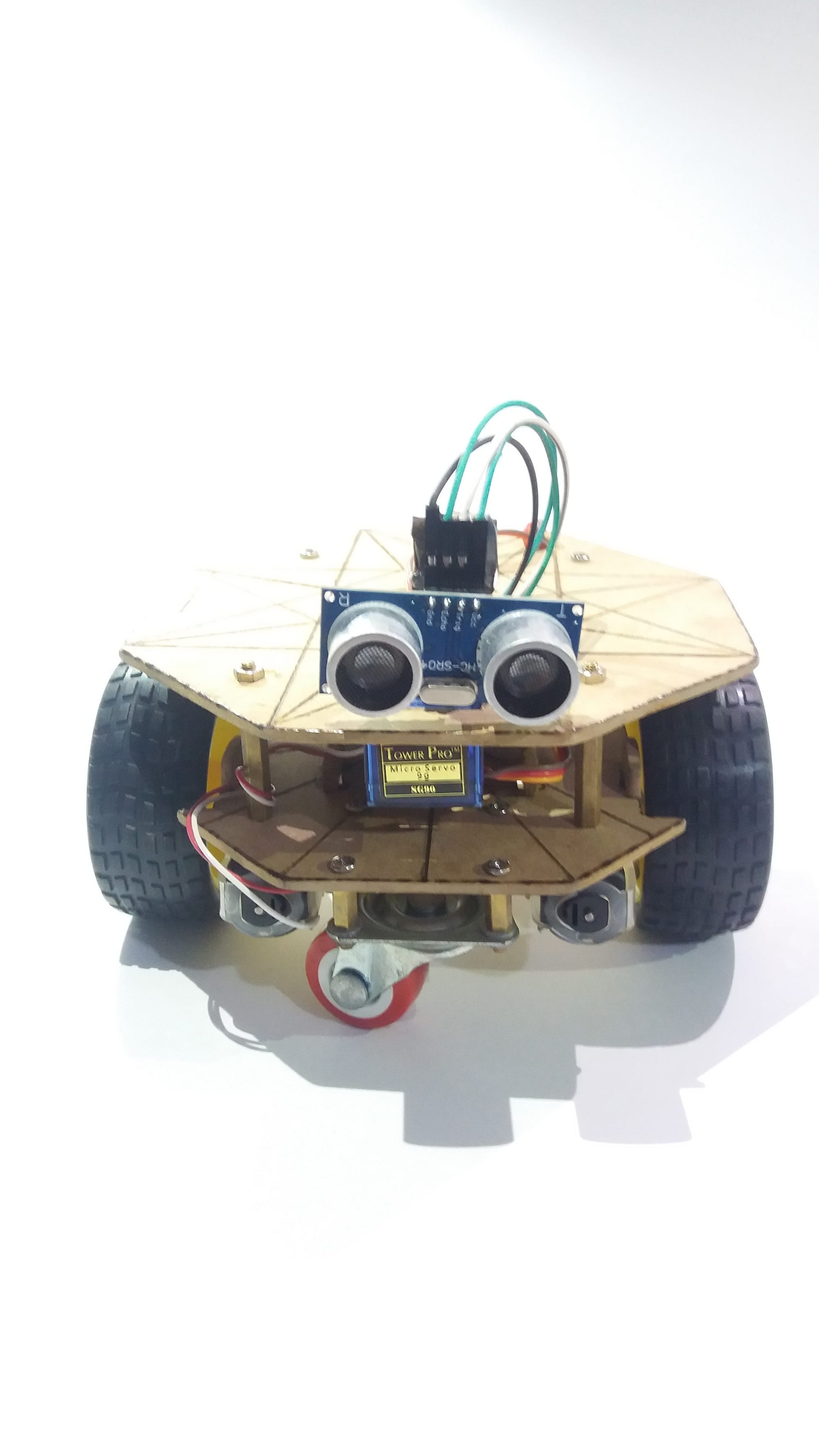 Carro tele controlado por medio de un App en el celular controlada por Bluetooth.
Carro tele controlado por medio de un App en el celular controlada por Bluetooth.
La programación que incluye el carro a control remoto es la siguiente:
//Programa Titans Technology S.A.S para el carro a control remoto
#include // Incluye la librería Servo
Servo servo1; // Crea el objeto servo 1 con las características de Servo
int izqA = 5;
int izqB = 6;
int derA = 9;
int derB = 10;
int vel = 255; // Velocidad de los motores
int estado = 'c';
void setup() {
Serial.begin(9600); // inicia el puerto serial para comunicación con el Bluetooth
//Definición de entrada y salida
pinMode(derA, OUTPUT);
pinMode(derB, OUTPUT);
pinMode(izqA, OUTPUT);
pinMode(izqB, OUTPUT);
servo1.attach(11,660,1400); // Asocia el servo1 al pin 11, define el min y max pwm
}
void loop() {
if(Serial.available()>0){ // lee el bluetooth y almacena en estado
estado = Serial.read();
}
if(estado=='a'){ // Botón desplazar al Frente
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, vel);
analogWrite(izqA, vel);
}
if(estado=='b'){ // Botón Izquierda
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, 0);
analogWrite(izqA, vel;
}
if(estado=='c'){ // Botón Parar
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, 0);
analogWrite(izqA, 0);
}
if(estado=='d'){ // Botón Derecha
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(izqA, 0);
analogWrite(derA, vel);
}
if(estado=='e'){ // Botón Reversa
analogWrite(derA, 0);
analogWrite(izqA, 0);
analogWrite(derB, vel);
analogWrite(izqB, vel);
}
}
CUBO LAMPARA LED
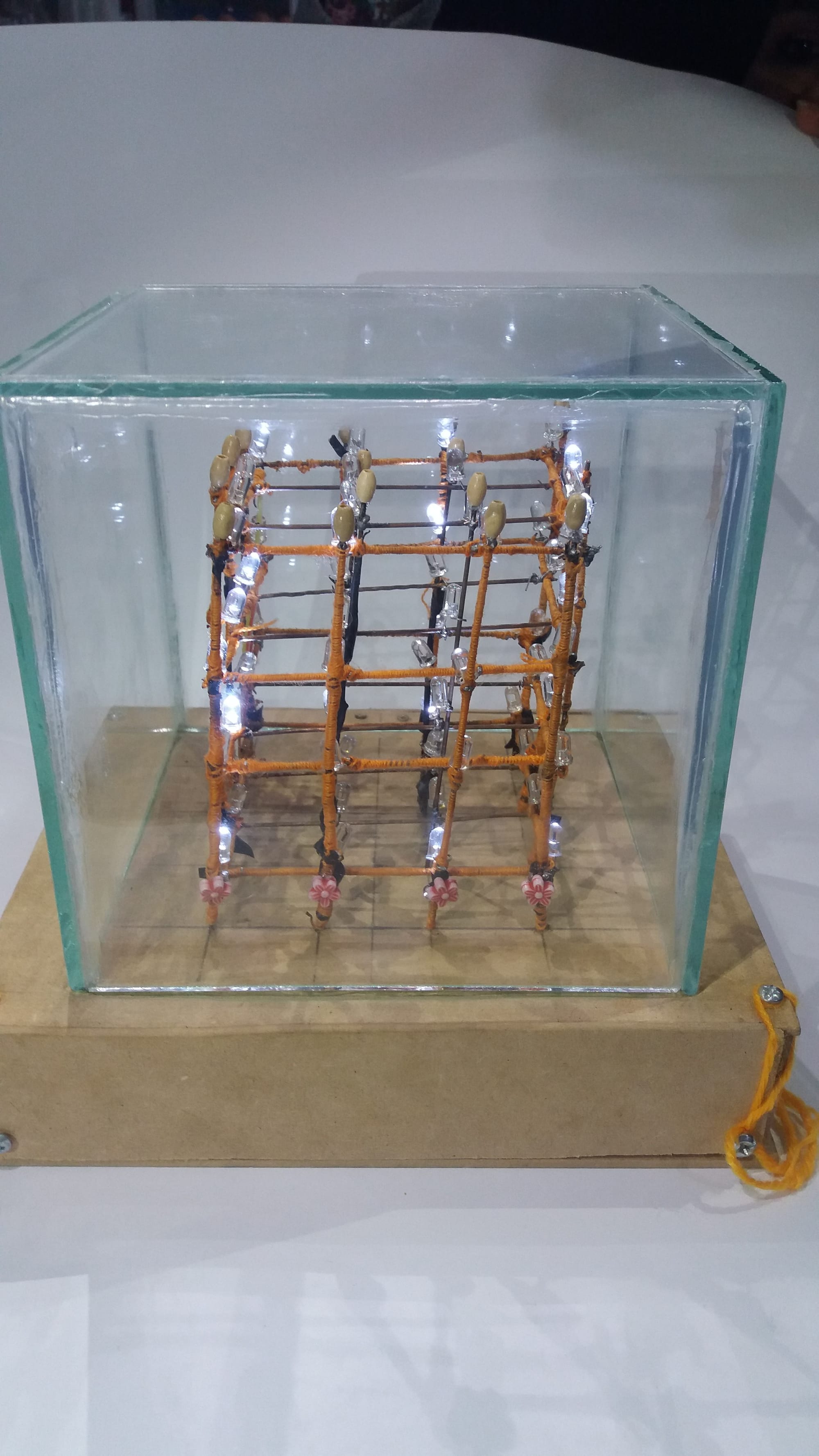
Lampara led con 64 Leds y bonita caja, ideal para mesa de noche con diferentes secuencias.
La programación que tiene el cubo led es la siguiente:
int led[] = {13,12,11,10,9,8,7,6,5,4,3,2,1,0,A4,A5}; //Salidas
de las columnas
int lvl[] = {A3,A2,A1,A0}; //Salidas
de las filas
int y; //Variable
para encender las filas
void setup() { //En esta parte se establece la
configuración
for (int x = 0; x < 16; x ++) { //Declarar los pines de las columnas
como salidas
pinMode(led[x], OUTPUT);
}
for (int x = 0; x < 4; x ++) { //Declarar los pines de las filas como
salidas
pinMode(lvl[x], OUTPUT);
}
}
void loop() { //En esta parte se repite la secuencia infinitas veces
for (int x = 0; x < 4; x++) { //Cada animación se repite 4 veces
uxu(); //Se llama a la función uxu
}
for (int x = 0; x < 4; x++) {
pxp(); //Se llama a la función pxp
}
for (int x = 0; x < 4; x++) {
cubito();//Se llama a la función cubito
}
for (int x = 0; x < 4; x++) {
cubote();//Se llama a la función cubote
}
for (int x = 0; x < 4; x++) {
itz(); //Se llama a la función itz
}
for (int x = 0; x < 4; x++) {
ser(); //Se llama a la función ser
}
}
//Esta función permite establecer valores de encendido y apagado a cada columna,
donde 1 es encendido y 0 es apagado
void LED (int h, int i, int j, int k, int l, int m, int n, int o, int p, int q,
int r, int s, int t, int u, int v, int w) {
digitalWrite (led[0], h);
digitalWrite (led[1], i);
digitalWrite (led[2], j);
digitalWrite (led[3], k);
digitalWrite (led[4], l);
digitalWrite (led[5], m);
digitalWrite (led[6], n);
digitalWrite (led[7], o);
digitalWrite (led[8], p);
digitalWrite (led[9], q);
digitalWrite (led[10], r);
digitalWrite (led[11], s);
digitalWrite (led[12], t);
digitalWrite (led[13], u);
digitalWrite (led[14], v);
digitalWrite (led[15], w);
}
void LVL (int h, int i, int j, int k) { //Esta función permite establecer
valores de encendido y apagado a cada fila
digitalWrite (lvl[0], h);
digitalWrite (lvl[1], i);
digitalWrite (lvl[2], j);
digitalWrite (lvl[3], k);
}
void level() { //En esta función se establecen los valores para las filas
donde con un 1 los leds no encienden y con 0 encienden
switch (y) {
case 0: LVL (0, 1, 1, 1); break; //La primera fila encendida
case 1: LVL (1, 0, 1, 1); break; //La segunda fila encendida
case 2: LVL (1, 1, 0, 1); break; //La tercera fila encendida
case 3: LVL (1, 1, 1, 0); break; //La cuarta fila encendida
case 4: LVL (0, 1, 1, 0); break; //Las filas exteriores encendidas
case 5: LVL (1, 0, 0, 1); break; //Las filas interiores encendidas
case 6: LVL (0, 0, 0, 0); break; //Todas las filas encendidas
case 7: LVL (0, 0, 0, 1); break; //Todas excepto la última
case 8: LVL (0, 0, 1, 1); break; //Las primeras dos
case 9: LVL (1, 1, 0, 0); break; //Las últimas dos
}
}
//En esta animación prende led por led
void uxu() {
int t = 100; //Esta variable determina el tiempo que espera el Arduino para
realizar la siguiente acción
for (int j = 0; j < 4; j++) { //Este for se utiliza para pasar de una fila a
otra
y = j; level();
LED (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1); delay(t);
}
}
//En esta animación prende fila por placa
void pxp()
{
int t = 500; //Esta variable determina el tiempo que espera el Arduino para
realizar la siguiente acción
for (int j = 0; j < 4; j++) { //Este for se utiliza para pasar de una fila a
otra
y = j; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
}
}
//En esta animación prende un cubo en el centro y después prende un cubo en el
exterior
void cubito() {
int t = 500; //Esta variable determina el tiempo que espera el Arduino para
realizar la siguiente acción
int a = 50; //Esta variable determina las veces que se repetirá una secuencia
para formar una imagen que no vibre
for (int x = 0; x < a; x++) { //este for se utiliza para crear una imagen que
no vibre
y = 4; level();
LED (1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1); delay(5);
y = 5; level();
LED (1, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 1); delay(5);
}
y = 5; level();
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a; x++) {
y = 4; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(5);
y = 5; level();
LED (1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1); delay(5);
}
y = 5; level();
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0); delay(t);
}
//En esta animación prende fila por fila hasta formar un cubo en el exterior
void cubote() {
//Prende una fila a la vez para formar un cubo sin centro
int t = 500;
int a = 50;
y = 6; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (1, 1, 1, 1, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1); delay(t);
LED (1, 1, 1, 1, 0, 0, 0, 1, 0, 0, 0, 1, 1, 1, 1, 1); delay(t);
LED (1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1); delay(t);
for (int x = 0; x < a; x++) {
y = 3; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(5);
y = 7; level();
LED (1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1); delay(5);
}
for (int x = 0; x < a; x++) {
y = 4; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(5);
y = 5; level();
LED (1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1); delay(5);
}
}
//En esta animación prende un cubo de 4 leds que se desplaza en el cubo grande
void itz() {
int t = 200;
y = 8; level();
LED (1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 8; level();
LED (0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 8; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 8; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0); delay(t);
y = 5; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0); delay(t);
y = 9; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 9; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 9; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1); delay(t);
LED (0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 9; level();
LED (0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 9; level();
LED (1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
y = 5; level();
LED (1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
y = 8; level();
LED (1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
}
//En esta animación prende una serie de tres leds que recorren todo el cubo
void ser() {
int t = 100;
int a = 10;
int b = 6.5;
for (int x = 0; x < b ; x++) {
y = 0; level();
LED (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 1; level();
LED (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 0; level();
LED (1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 1; level();
LED (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
y = 0; level();
LED (1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1); delay(t);
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1); delay(5);
}
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1); delay(t);
LED (0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0); delay(5);
}
y = 2; level();
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
y = 3; level()
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0); delay(5)
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1); delay(t);
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0); delay(5);
}
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 1, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0); delay(5);
}
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0); delay(5);
}
y = 1; level();
LED (0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
y = 2; level();
LED (0, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
y = 3; level();
LED (0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 1, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 1, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (1, 1, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
}
Kits
· Kits para la creación de brazo robótico con madera MDF, 6 servomotores, un Arduino uno, cable de programación, cabreado y tornillería, se incluye un manual de ensamble y el tutorial en CD del proyecto.
· Kits para la creación de un carro a control remoto con madera MDF, 2 llantas, 2 motorreductores, 1 Arduino uno, cable de programación, cableado, 1 modulo bluetooth, 1 rueda loca, 1 puente h, porta baterías, tornillerías, además incluye un manual de ensamble y el tutorial en CD del proyecto.
· Kits para la creación de robot esquiva obstáculos con madera MDF, 2 llantas, 2 motorreductores, Arduino uno, 1 sensor ultrasonido, q1 puente h, cableado y tornillería, además incluye un manual de ensamble y el tutorial en CD del proyecto.
· Kits para la creación de una lampara cubo led, con base en madera MDF, 64 leds, Arduino uno, 1 metro de estaño y cable de programación, además incluye un manual de ensamble y el tutorial en CD del proyecto
En los tutoriales hay dos secciones, la parte de construcción y la parte de programación. En la parte de construcción se mostrara el ensamble con el kit que el cliente pueda adquirir en la página web de Titans Technology, además de la explicación detallada y del funcionamiento de cada elemento que se va a utilizar para la creación del proyecto y programas para el diseño de circuitos electrónicos que permitan utilizar Arduino y en las partes de programación, el cliente recibirá la explicación detallada de fundamentos de la programación, principios básicos, consejos para programar, tipos de variables y operadores, estructuras de decisión y de repetición, explicación de librerías utilizadas y aclarar la diferencia entre las señales de Arduino.
Este negocio se realiza para aprender como iniciar, construir y mantener una empresa,
adquiriendo cada día conocimientos para mantener y consolidar nuestro proyecto,
creciendo día a día como personas y empresa.
Para entrar en contacto con nosotros ¡Entra a nuestra página web! Página Titans Technology.
Si quieres ver nuestros documentos los dejaremos aquí abajo.
Formato PPP entregado al área Técnica
Servo Base; // Creación de un objeto servo, ubicación: base, movimiento: izquierda - derecha
Servo Izquierdo; // Creación de un objeto servo, ubicación: izquierda, movimiento: adelante - atrás
Servo Derecho; // Creación de un objeto servo, ubicación: derecha, movimiento: adelante - atrás
Servo Garra; // Creación de un objeto servo, ubicación: extremo del brazo, movimiento: abrir - cerrar
//Definición de variables que contienen la posición del servo (1-180°)
int PosicionBase;
int PosicionIzquierdo;
int PosicionDerecho;
int PosicionGarra;
//La función de configuración se ejecuta al restablecer o encender la placa.
void setup() {
Base.attach(11); // Asignación del pin 11 al objeto servo de la base
Izquierdo.attach(10); // Asignación del pin 10 al objeto servo izquierdo
Derecho.attach(9); // Asignación del pin 9 al objeto servo derecho
Garra.attach(6); // Asignación del pin 6 al objeto servo de la garra
// Declara el puerto serie
Serial.begin(9600);
}
//La función de repetición se ejecuta después del void setup()
void loop() {
//Obtener el número de bytes disponibles para leer desde el puerto serie que se encuentra disponible en Serial.parseInt()
while (Serial.available() > 0) {
PosicionBase = Serial.parseInt();
PosicionIzquierdo = Serial.parseInt();
PosicionDerecho = Serial.parseInt();
PosicionGarra = Serial.parseInt();
if (Serial.read() == 'x') { // Continua y actualiza las posiciones del servo
// Actualiza las posiciones del servo correspondiente
Base.write(PosicionBase);
Izquierdo.write(PosicionIzquierdo);
Derecho.write(PosicionDerecho);
Garra.write(PosicionGarra);
}
}
}
Basado en el popular MeArm. Es compatible con Arduino o cualquier tarjeta de desarrollo o microcontrolador con salidas digitales o de PWM. Es un proyecto tecnológico escolar para hacer que hasta los más pequeños aprendan a construir su propio brazo robótico.
!Está listo para comenzar a crear su propia programación¡
Sin embargo ya está pre programado para ser utilizado con el software de Mecon
CARRO CONTROL REMOTO Y EVASOR
La programación que incluye el carro a control remoto es la siguiente:
//Programa Titans Technology S.A.S para el carro a control remoto
#include // Incluye la librería Servo
Servo servo1; // Crea el objeto servo 1 con las características de Servo
int izqA = 5;
int izqB = 6;
int derA = 9;
int derB = 10;
int vel = 255; // Velocidad de los motores
int estado = 'c';
void setup() {
Serial.begin(9600); // inicia el puerto serial para comunicación con el Bluetooth
//Definición de entrada y salida
pinMode(derA, OUTPUT);
pinMode(derB, OUTPUT);
pinMode(izqA, OUTPUT);
pinMode(izqB, OUTPUT);
servo1.attach(11,660,1400); // Asocia el servo1 al pin 11, define el min y max pwm
}
void loop() {
if(Serial.available()>0){ // lee el bluetooth y almacena en estado
estado = Serial.read();
}
if(estado=='a'){ // Botón desplazar al Frente
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, vel);
analogWrite(izqA, vel);
}
if(estado=='b'){ // Botón Izquierda
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, 0);
analogWrite(izqA, vel;
}
if(estado=='c'){ // Botón Parar
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(derA, 0);
analogWrite(izqA, 0);
}
if(estado=='d'){ // Botón Derecha
analogWrite(derB, 0);
analogWrite(izqB, 0);
analogWrite(izqA, 0);
analogWrite(derA, vel);
}
if(estado=='e'){ // Botón Reversa
analogWrite(derA, 0);
analogWrite(izqA, 0);
analogWrite(derB, vel);
analogWrite(izqB, vel);
}
}
CUBO LAMPARA LED
Lampara led con 64 Leds y bonita caja, ideal para mesa de noche con diferentes secuencias.
La programación que tiene el cubo led es la siguiente:
int led[] = {13,12,11,10,9,8,7,6,5,4,3,2,1,0,A4,A5}; //Salidas
de las columnas
int lvl[] = {A3,A2,A1,A0}; //Salidas
de las filas
int y; //Variable
para encender las filas
void setup() { //En esta parte se establece la
configuración
for (int x = 0; x < 16; x ++) { //Declarar los pines de las columnas
como salidas
pinMode(led[x], OUTPUT);
}
for (int x = 0; x < 4; x ++) { //Declarar los pines de las filas como
salidas
pinMode(lvl[x], OUTPUT);
}
}
void loop() { //En esta parte se repite la secuencia infinitas veces
for (int x = 0; x < 4; x++) { //Cada animación se repite 4 veces
uxu(); //Se llama a la función uxu
}
for (int x = 0; x < 4; x++) {
pxp(); //Se llama a la función pxp
}
for (int x = 0; x < 4; x++) {
cubito();//Se llama a la función cubito
}
for (int x = 0; x < 4; x++) {
cubote();//Se llama a la función cubote
}
for (int x = 0; x < 4; x++) {
itz(); //Se llama a la función itz
}
for (int x = 0; x < 4; x++) {
ser(); //Se llama a la función ser
}
}
//Esta función permite establecer valores de encendido y apagado a cada columna,
donde 1 es encendido y 0 es apagado
void LED (int h, int i, int j, int k, int l, int m, int n, int o, int p, int q,
int r, int s, int t, int u, int v, int w) {
digitalWrite (led[0], h);
digitalWrite (led[1], i);
digitalWrite (led[2], j);
digitalWrite (led[3], k);
digitalWrite (led[4], l);
digitalWrite (led[5], m);
digitalWrite (led[6], n);
digitalWrite (led[7], o);
digitalWrite (led[8], p);
digitalWrite (led[9], q);
digitalWrite (led[10], r);
digitalWrite (led[11], s);
digitalWrite (led[12], t);
digitalWrite (led[13], u);
digitalWrite (led[14], v);
digitalWrite (led[15], w);
}
void LVL (int h, int i, int j, int k) { //Esta función permite establecer
valores de encendido y apagado a cada fila
digitalWrite (lvl[0], h);
digitalWrite (lvl[1], i);
digitalWrite (lvl[2], j);
digitalWrite (lvl[3], k);
}
void level() { //En esta función se establecen los valores para las filas
donde con un 1 los leds no encienden y con 0 encienden
switch (y) {
case 0: LVL (0, 1, 1, 1); break; //La primera fila encendida
case 1: LVL (1, 0, 1, 1); break; //La segunda fila encendida
case 2: LVL (1, 1, 0, 1); break; //La tercera fila encendida
case 3: LVL (1, 1, 1, 0); break; //La cuarta fila encendida
case 4: LVL (0, 1, 1, 0); break; //Las filas exteriores encendidas
case 5: LVL (1, 0, 0, 1); break; //Las filas interiores encendidas
case 6: LVL (0, 0, 0, 0); break; //Todas las filas encendidas
case 7: LVL (0, 0, 0, 1); break; //Todas excepto la última
case 8: LVL (0, 0, 1, 1); break; //Las primeras dos
case 9: LVL (1, 1, 0, 0); break; //Las últimas dos
}
}
//En esta animación prende led por led
void uxu() {
int t = 100; //Esta variable determina el tiempo que espera el Arduino para
realizar la siguiente acción
for (int j = 0; j < 4; j++) { //Este for se utiliza para pasar de una fila a
otra
y = j; level();
LED (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1); delay(t);
}
}
//En esta animación prende fila por placa
void pxp()
{
int t = 500; //Esta variable determina el tiempo que espera el Arduino para
realizar la siguiente acción
for (int j = 0; j < 4; j++) { //Este for se utiliza para pasar de una fila a
otra
y = j; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
}
}
//En esta animación prende un cubo en el centro y después prende un cubo en el
exterior
void cubito() {
int t = 500; //Esta variable determina el tiempo que espera el Arduino para
realizar la siguiente acción
int a = 50; //Esta variable determina las veces que se repetirá una secuencia
para formar una imagen que no vibre
for (int x = 0; x < a; x++) { //este for se utiliza para crear una imagen que
no vibre
y = 4; level();
LED (1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1); delay(5);
y = 5; level();
LED (1, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 1); delay(5);
}
y = 5; level();
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a; x++) {
y = 4; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(5);
y = 5; level();
LED (1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1); delay(5);
}
y = 5; level();
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0); delay(t);
}
//En esta animación prende fila por fila hasta formar un cubo en el exterior
void cubote() {
//Prende una fila a la vez para formar un cubo sin centro
int t = 500;
int a = 50;
y = 6; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (1, 1, 1, 1, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1); delay(t);
LED (1, 1, 1, 1, 0, 0, 0, 1, 0, 0, 0, 1, 1, 1, 1, 1); delay(t);
LED (1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1); delay(t);
for (int x = 0; x < a; x++) {
y = 3; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(5);
y = 7; level();
LED (1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1); delay(5);
}
for (int x = 0; x < a; x++) {
y = 4; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(5);
y = 5; level();
LED (1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1); delay(5);
}
}
//En esta animación prende un cubo de 4 leds que se desplaza en el cubo grande
void itz() {
int t = 200;
y = 8; level();
LED (1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 8; level();
LED (0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 8; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 8; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0); delay(t);
y = 5; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0); delay(t);
y = 9; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 9; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 9; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1); delay(t);
LED (0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 9; level();
LED (0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
y = 9; level();
LED (1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
y = 5; level();
LED (1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
y = 8; level();
LED (1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
y = 6; level();
LED (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1); delay(t);
}
//En esta animación prende una serie de tres leds que recorren todo el cubo
void ser() {
int t = 100;
int a = 10;
int b = 6.5;
for (int x = 0; x < b ; x++) {
y = 0; level();
LED (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 1; level();
LED (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 0; level();
LED (1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 1; level();
LED (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
y = 0; level();
LED (1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1); delay(t);
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1); delay(5);
}
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1); delay(t);
LED (0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0); delay(5);
}
y = 2; level();
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0); delay(5);
y = 3; level()
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0); delay(5)
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1); delay(t);
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0); delay(5);
}
y = 0; level();
LED (0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 1, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 0; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 1; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0); delay(5);
}
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < b ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0); delay(5);
}
y = 1; level();
LED (0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
y = 2; level();
LED (0, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
y = 3; level();
LED (0, 0, 1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 1, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 0, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (0, 1, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (1, 1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
LED (1, 1, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(t);
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 2; level();
LED (1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 3; level();
LED (0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
for (int x = 0; x < a ; x++) {
y = 1; level();
LED (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
y = 2; level();
LED (1, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); delay(5);
}
}
Kits
· Kits para la creación de brazo robótico con madera MDF, 6 servomotores, un Arduino uno, cable de programación, cabreado y tornillería, se incluye un manual de ensamble y el tutorial en CD del proyecto.
· Kits para la creación de un carro a control remoto con madera MDF, 2 llantas, 2 motorreductores, 1 Arduino uno, cable de programación, cableado, 1 modulo bluetooth, 1 rueda loca, 1 puente h, porta baterías, tornillerías, además incluye un manual de ensamble y el tutorial en CD del proyecto.
· Kits para la creación de robot esquiva obstáculos con madera MDF, 2 llantas, 2 motorreductores, Arduino uno, 1 sensor ultrasonido, q1 puente h, cableado y tornillería, además incluye un manual de ensamble y el tutorial en CD del proyecto.
· Kits para la creación de una lampara cubo led, con base en madera MDF, 64 leds, Arduino uno, 1 metro de estaño y cable de programación, además incluye un manual de ensamble y el tutorial en CD del proyecto
En los tutoriales hay dos secciones, la parte de construcción y la parte de programación. En la parte de construcción se mostrara el ensamble con el kit que el cliente pueda adquirir en la página web de Titans Technology, además de la explicación detallada y del funcionamiento de cada elemento que se va a utilizar para la creación del proyecto y programas para el diseño de circuitos electrónicos que permitan utilizar Arduino y en las partes de programación, el cliente recibirá la explicación detallada de fundamentos de la programación, principios básicos, consejos para programar, tipos de variables y operadores, estructuras de decisión y de repetición, explicación de librerías utilizadas y aclarar la diferencia entre las señales de Arduino.
Este negocio se realiza para aprender como iniciar, construir y mantener una empresa,
adquiriendo cada día conocimientos para mantener y consolidar nuestro proyecto,
creciendo día a día como personas y empresa.
Para entrar en contacto con nosotros ¡Entra a nuestra página web! Página Titans Technology.
Si quieres ver nuestros documentos los dejaremos aquí abajo.
Formato PPP entregado al área Técnica
Formato PPP entregado al área Empresarial


Comentarios
Publicar un comentario